### Hummingbird-based smart cart **<span style="font-size:16px;">Project name:</span>**<span style="font-size:16px;">Hummingbird-based intelligent cart</span> **<span style="font-size:16px;">Specific requirements:</span>**<span style="font-size:16px;">Based on PERF-V development board to complete the intelligent cart to achieve automatic tracing and obstacle avoidance functions.</span> <span style="font-size:16px;"> The system adopts PWM wave generated by FPGA to regulate the speed of the cart, infrared sensor detects the black trajectory on the road and feeds the detected signal to the FPGA, which issues a command from the collected signal to control the motor drive circuit of the cart to adjust the driving direction, so that the cart can automatically travel along the black trajectory, while using the ultrasonic module to detect the obstacles in front of it in real time. Realize the obstacle avoidance and tracing function of the trolley. </span> #### Trolley installation steps **<span style="font-size:16px;">First, the car motor universal wheel installation.</span>** <span style="font-size:16px;">The nut must be installed on the inside of the cart or the side will obstruct the wheel operation. Universal wheel installation needs to take the copper column support.</span> 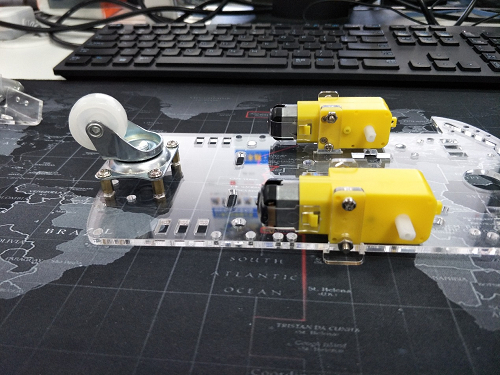 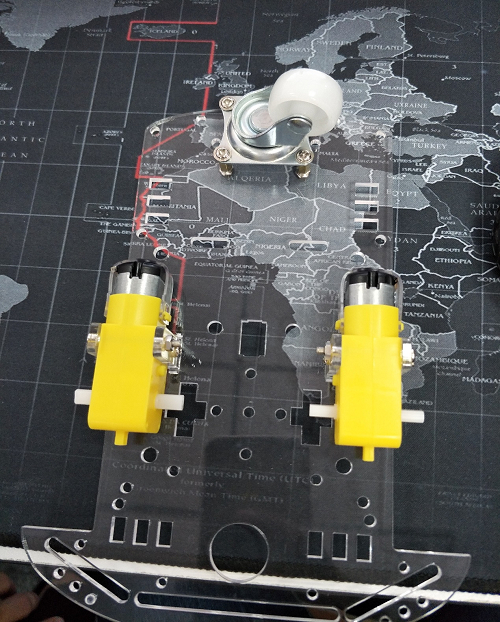 **<span style="font-size:16px;">Second, the installation of the servo and tracking module.</span>** <span style="font-size:16px;">The servo is fixed to the chassis of the car through the tray and connected to the tracking module through the copper column. The light of the tracing module needs to be perpendicular to itself as shown in the figure (the light of the tracing module is originally forward)</span> 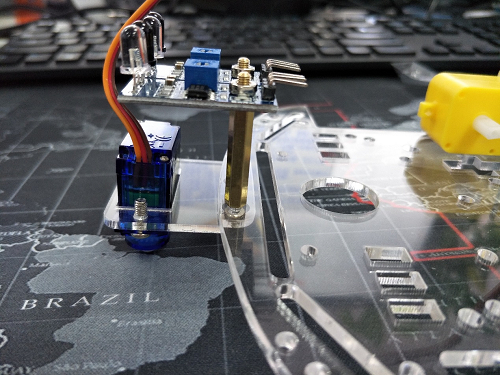 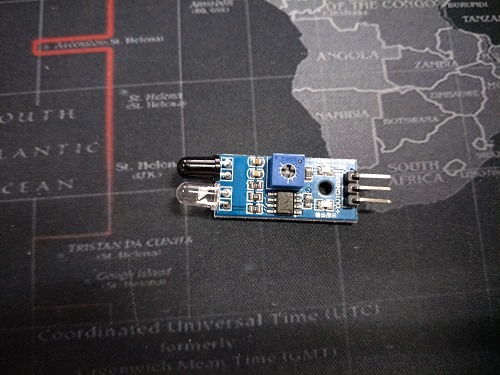 **<span style="font-size:16px;">Third, the installation of the drive module.</span>** <span style="font-size:16px;">The driver module needs four copper pillars to be erected, two points and the corresponding points of the chassis can be fixed.</span> 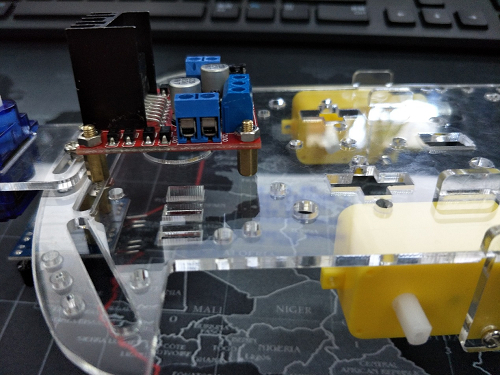 **<span style="font-size:16px;">Fourth, the perf development board installation.</span>** <span style="font-size:16px;">The hole at the edge of the board needs to be fixed with copper pillars, two of the points need to be fixed with the chassis hole, and the chassis can be fixed by simply taking the copper pillars.</span> 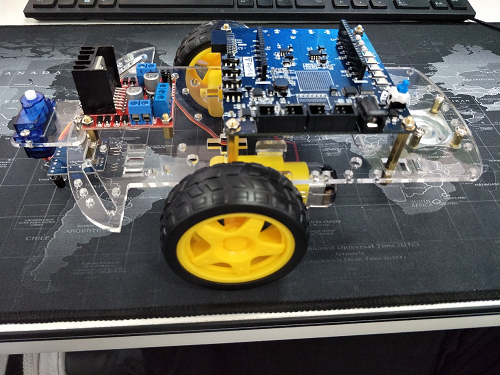 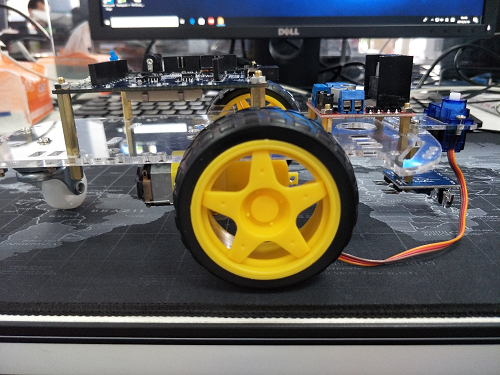 **<span style="font-size:16px;">Fifth, the installation of the battery box.</span>** <span style="font-size:16px;">Battery box with screws aligned with the hole can be fixed (fixed a hole can be)</span> 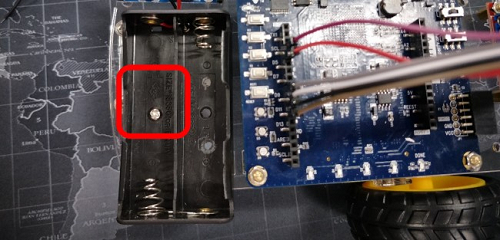 **<span style="font-size:16px;">Six, the final ultrasonic probe to be connected to the rudder disk with the servo, and then installed on the servo.</span>** <span style="font-size:16px;">When installing the rudder disk must pay attention to the screws cannot be too tight, otherwise it will touch the rudder affect the steering of the rudder.</span> 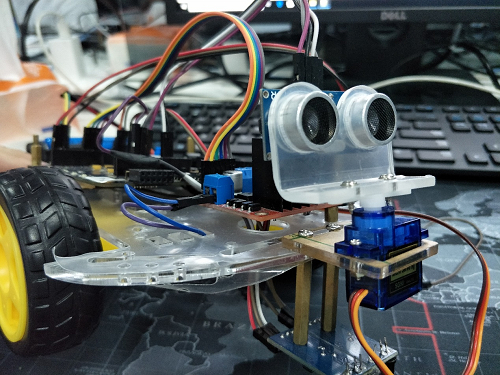 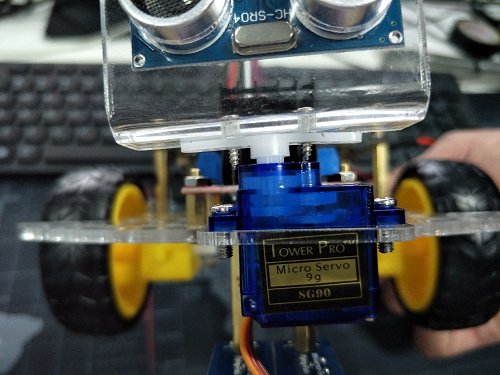 **<span style="font-size:22px;color:#FF0000;">Note: the wiring should be correct (especially the power supply), otherwise it may burn the motherboard</span>** **<span style="font-size:16px;">Wiring table</span>** 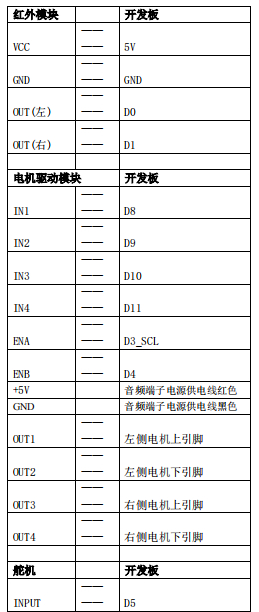 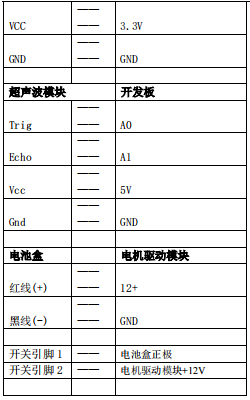 **<span style="font-size:16px;">Bill of materials for smart car</span>** 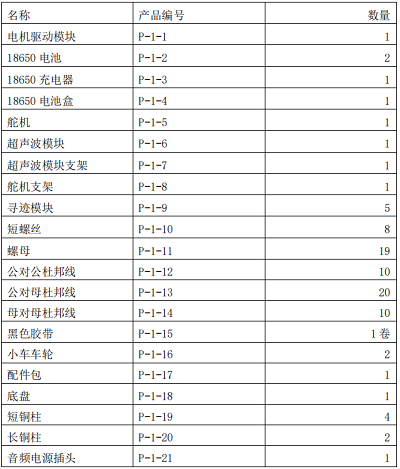 --- 