The system uses the PWM wave generated by FPGA to regulate the speed of the car, the infrared sensor to detect the track, feeds the detected signal back to the FPGA to adjust the direction of travel, and uses the ultrasonic module to detect obstacles.(<a href="https://www.bilibili.com/video/BV1zf4y1W78a" target="_blank">Video link</a>) <div styke="width:100%;text-align:center;"> 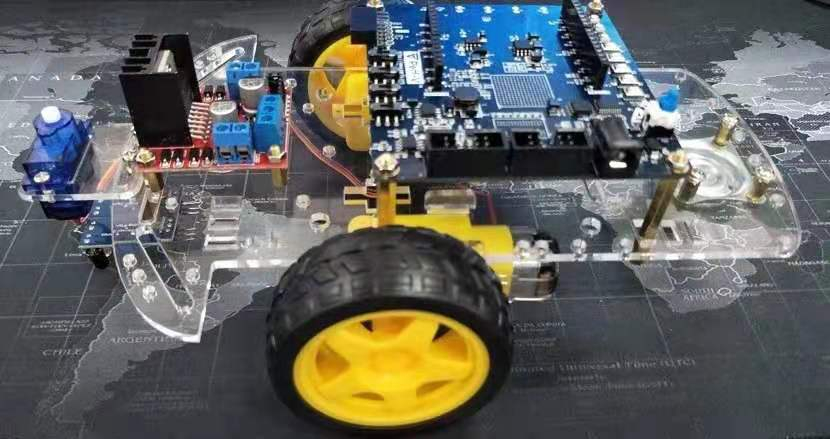 </div> <span style="font-size:24px;"> </span> <div style="width:100%;text-align:center;">  </div>